Computer support, program development, prototypes , microcontrollers
Hire Me
I will support your computer
or I will develop a new computer program
or I will design a new microcontroler based device for your needs
info@kalarakis.gr
ΤΟ ROBOT MOY
Πώς θα φτιάξω ένα αυτοκινούμενο robot ;
Την απάντηση στην παραπάνω ερώτηση προσπαθούμε να δώσουμε σε αυτή την εργασία !
Συντελεστές : ΓΕΩΡΓΙΟΣ Μ. ΚΑΛΑΡΑΚΗΣ , ΜΗΝΑΣ Γ.ΚΑΛΑΡΑΚΗΣ
2η υλοποίηση
Το Robot μας, έχει σχεδόν ολοκληρωθεί !!!.
Η μονάδα της κάμερας C3188A με τον OV7620 είναι στο στάδιο της ανάπτυξης
Τη μονάδα την αντικαταστήσαμε με τον C328 Jpeg module με σειριακή επικοινωνία μέσω του Wi232EUR
ΤΕΧΝΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ
Οχημα DuraTrax Evader EP ST w/ESC
Επεξεργαστής
α) μικροεπεξεργαστές για τον έλεγχο του οχήματος
β) PC για το κεντρικό πρόγραμμα
Επικοινωνίες ZigBee 802.15
Γλώσσα προγρ/μου C
Τροφοδοσία 7,5 V για τα ηλετρονικά μέρη και τα servo
Υψος (max) 6.6" (168mm) Mήκος (max) 16.1" (409mm)
Αισθητήρια
Camera module C3188A με έλεγχο από Microchip 30F6012A
180 μοίρες
Devantech Electronic compass
Servos 2 (Camera και τιμόνι)
Ταχύτητα κίνησης
ElectronicSpeedControl η μονάδα συνοδεύει το όχημα. Συμπεριφέρεται σαν servo και τροφοδοτεί το μοτέρ που είναι ήδη τοποθετημένο στο όχημα.
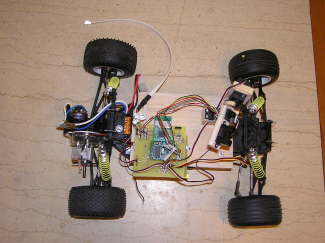
1η υλοποίηση
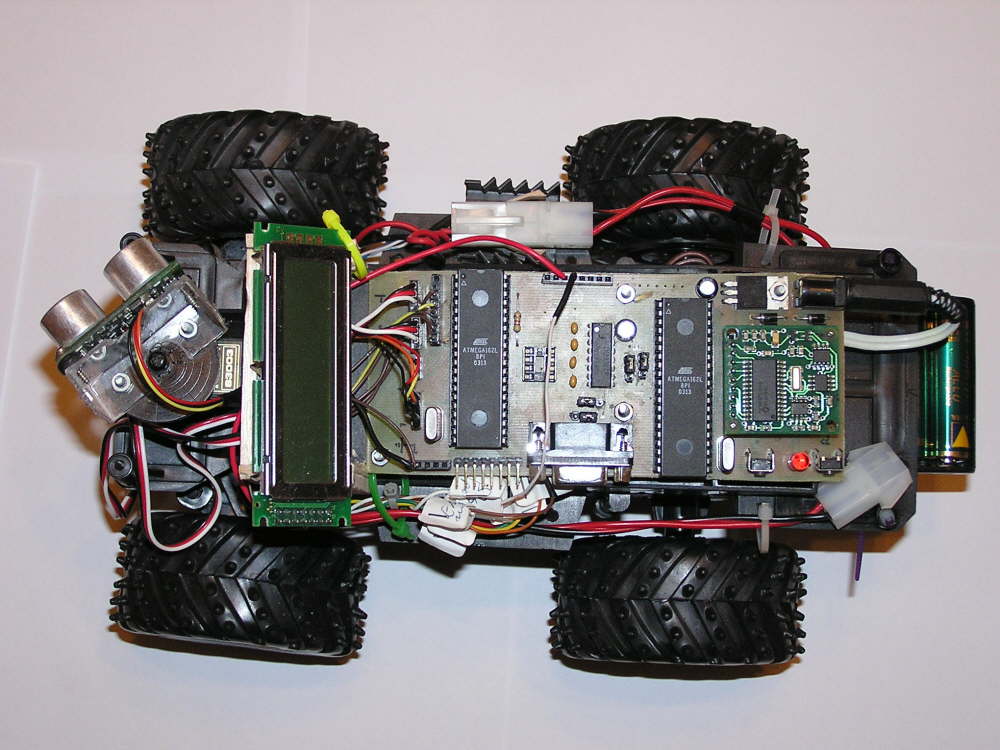
Το αμάξωμα αποτελείται από παλαιό τηλεκατευθυνόμενο παιχνίδι του Γιώργου, από το οποίο αφαιρέθηκαν όλα τα ηλεκτρονικά εξαρτήματα. Καλή και φτηνή λύση για την κίνηση. Το αμάξωμα διαθέτει διαιρέτη για γρήγορη και αργή κίνηση. Η επιλογή γίνεται με περιστροφικό διακότπη στο πίσω μέρος.
Απαραίτητη κρίθηκε η προσθήκη κυκλώματος για τον έλεγχο την ταχύτητας μια και το πρότυπο έτρεχε πολύ γρήγορα (80cm/s) για τα δεδομένα του δωματίου των δοκιμών.
ΤΟ ROBOT MOY 1η υλοποίηση: Αποτελέσματα - Συμπεράσματα
1. Η πλατφόρμα υλοποίησης απαιτεί όχημα με περισσότερη ακρίβεια στις κινήσεις του. Το παρόν όχημα (παιχνίδι) δεν μπορεί να κινηθεί σε ευθεία λόγω των μεγάλων ανοχών που υπάρχουν στους άξονες κίνησης και στο τιμόνι.
2. Η μεταβολή της ταχύτητας (για τον παρόν εξοπλισμό) πρέπει να γίνει με μεταβολή της τάσης στο μοτέρ κίνησης.
3. Το sonar (Devantech SRF04 Sonar) έχει κώνο εκπομπής 60 μοίρες. Αυτό σημαίνει ότι το Robot μας πρέπει να βρίσκεται σε απόσταση τουλάχιστο 60 cm από τα αντικείμενα που βρίσκονται στα πλάγια. Πρέπει, δε, να κοιτάζει τουλάχιστο 40 μοίρες προς τα πάνω. Η απόδοσή του είναι ικανοποιητική για αποστάσεις αντικειμένων μικρότερη των 50cm H μέτρηση της απόστασης γίνεται με μέτρηση της διάρκειας του πλάτους του παλμού σε κατάσταση High. Κατά τη διάρκεια της μέτρησης ο μικροελεγκτής δεν μπορεί να ασχοληθεί με τα άλλα περιφερικά. Αν χρησιμοποιηθούν τα Interupts τότε η μέτρηση τις περισσότερες φορές είναι παντελώς λάθος. Επειδή δεν ενσωματώνει δικό του επεξεργαστή πρέπει να χρησιμοποιηθεί επιπλέον επεξεργαστής και η επικοινωνία με τον κεντρικό να γίνεται με πρωτόκολλο Ι2C.
4. Devantech Electronic compass. Ικανοποιητική απόδοση και ακρίβεια στις μετρήσεις. Ενσωματώνει δικό του επεξεργαστή και χρησιμοποιεί το I2C για την επικοινωνία με τον κεντρικό επεξεργαστή.
Κατά τη διάρκεια των δοκιμών έγινε φανερό ότι το Robot μας μπορεί να ξεκινήσει από την σταθερή βάση του και να κινηθεί προς ένα αντικείμενο που βρίσκεται σε απόσταση πάνω από 1 μέτρο. Αν υπάρχει κοντά και άλλο αντικείμενο τότε τα αντιμετωπίζει σαν ένα αντικείμενο (βλ. sonar) Αν η απόσταση είναι μικρότερη των 1 μέτρων τότε δεν προλαβαίνει να ρυθμίσει την ταχύτητα κάνοντας τις απαραίτητες μετρήσεις για την απόσταση και κουτουλά πάνω στο αντικείμενο.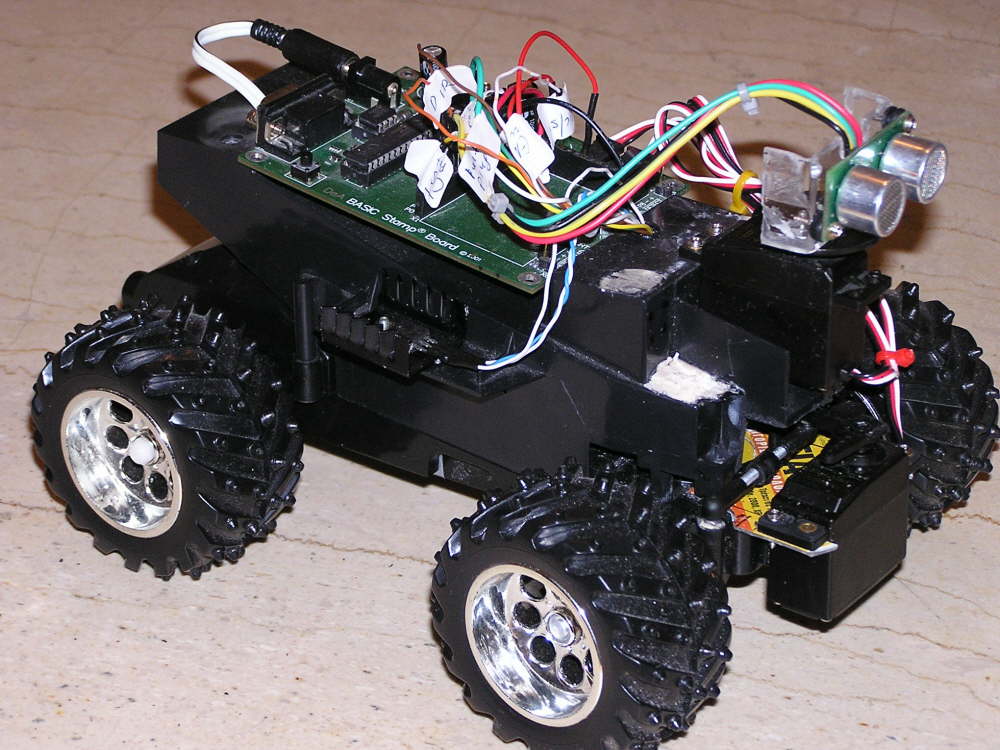
Όταν ικανοποιούνται οι παραπάνω συνθήκες τότε το Robot μας α) ξεκινά με ομαλά αυξανόμενη ταχύτητα
β) προσεγγίζει το αντικείμενο έχοντας αναγνωρίσει την απόσταση που το χωρίζει από αυτό
γ) σταματά σε απόσταση 30 – 40 cm
δ) αναζητά αν υπάρχει οδός διαφυγής πρώτα από αριστερά και μετά από δεξιά
ε) αν υπάρχει η δυνατότητα τότε στρίβει στην κατάλληλη γωνία (αφού κάνει πίσω και μπροστά όσες φορές χρειαστεί) χρησιμοποιώντας τις μετρήσεις από το sonar και την πυξίδα. Προχωρά μπροστά 40 cm και στρίβει δεξιά (ή αριστερά) για να επανέλθει στην σωστή πορεία. (δεν υλοποιήθηκε ο αλγόριθμός για επαναφορά πάνω στο αρχικό άξονα της κίνησης) - τώρα το Robot μας είναι 30 cm σε παράλληλη πορεία με την αρχική.
ζ) αν δεν βρει διέξοδο τότε κάνει στροφή 180 μοιρών και επιστρέφει στη βάση του (δεν υπάρχει μονάδα ελέγχου για εμπόδια στην πίσω πλευρά).
Η πρώτη υλοποίηση είχε σκοπό να μελετηθούν και να αξιολογηθούν οι δομικές μονάδες που πωλούνται στο internet για την κατασκευή αυτόνομων συστημάτων. (έτος 2002)
Συμπεράναμε ότι :
α) οι μονάδες αυτές έχουν ικανοποιητική λειτουργία σε απλές κατασκευές με μικρές απαιτήσεις στη λογική που θα υλοποιηθεί.
β) λόγω της απλότητας τους μπορούν να αξιοποιηθούν για εκπαιδευτικούς σκοπούς.
Μετά την ολοκλήρωση των μετρήσεων και την αξιολόγηση των μονάδων που χρησιμοποιήθηκαν το Robot μας αποσυναρμολογήθηκε προκειμένου οι μονάδες του να χρησιμοποιηθούν στην υλοποίηση Νο 2
Για σχόλια παρατηρήσεις κτλ επικοινωνήστε μαζί μας στο info@kalarakis.gr ή στο 0030 6932435031
Σημείωση: Στην εργασία, αυτή δεν προσπαθούμε να ανακαλύψουμε νέες τεχνολογίες. Είναι μια προσπάθεια να περάσουμε ευχάριστα και δημιουργικά τον ελεύθερο χρόνο που διαθέτουμε, να αυξήσουμε τις γνώσεις μας στον αυτοματισμό, τη ρομποτική, στην τεχνολογία των υπολογιστών.
Κάθε σχόλιο και παρατήρηση είναι ευπρόσδεκτη. Αν στη σελίδα μας είδατε κάτι που σας ενδιαφέρει επικοινωνήστε μαζί μας.
Follow me on ![]() Follow me at
Follow me at ![]()